-

imaginAviation 2024 Panel: How Ideas Become Innovation
-
People Ops
Torc in Glassdoor's Top 25 'Best Places to Work in 2024,' According to Our Employees
-
Trucking
Torc and Uber Freight Announce Strategic Partnership Focused on Logistics Insights
-
News
Automated Vehicle Safety Consortium (AVSC) Welcomes Torc
-
Innovation in Motion: Schneider and Torc Robotics’ Self-Driving Freight Pilot
-
Safety
Torc’s Michelle Chaka Details Safety at ADAS & Autonomous Vehicle Tech Expo 2023
-
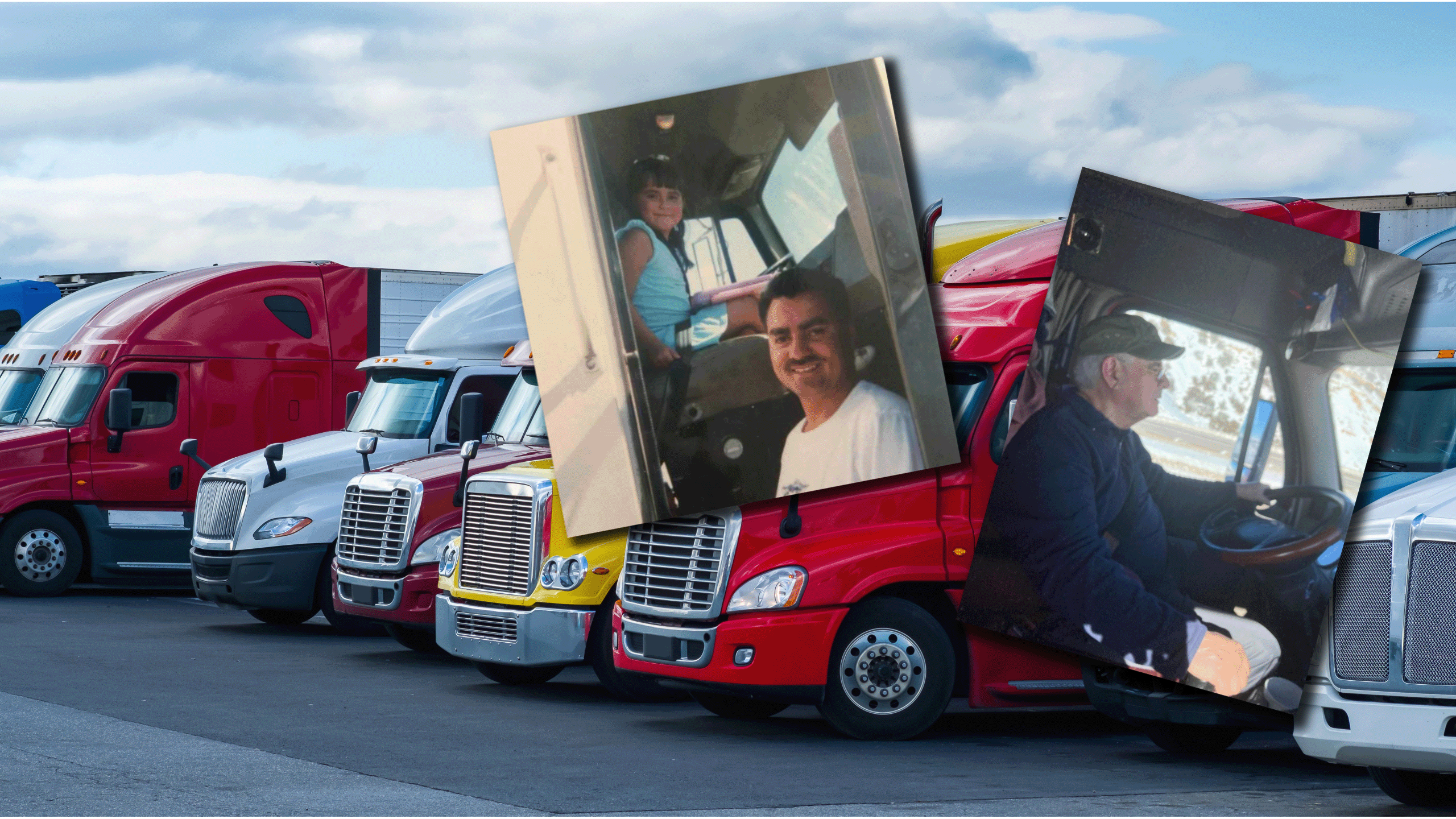
Trucking
When 'Thank A Trucker Week' Means Calling Dad
-
Learning about Autonomous Vehicle Technology
Q&A: Self-Driving Vehicles and Bad Weather