Originally published in 2017, this article offers insight into Torc Robotics’ past pursuit: the creation of a self-driving car for consumer audiences. Complete with a Torc created software suite and state-of-the-art perception modules, our journey into autonomy was bolstered by this exciting project. In 2o19, we made the incredible shift towards inputting this technology into self-driving semi-trucks. Alongside our OEM partner, Daimler Truck, we’re exploring the autonomous future of shipping. For more information about our current project, please visit our technology page.
Inclement weather is one of many challenges self-driving cars must face. This is due to a number of reasons: weather is unpredictable, for one, which isn’t ideal for any kind of driver, whether they be human or robotic. Weather is also a challenge for some of the hardware used in the vehicle’s perception suite. LiDAR, for instance, may “see” a raindrop and perceive that there could be something in the way. In Torc’s case, we use a combination of radar, LiDAR, and cameras to ensure that this kind of an issue isn’t an unsurmountable issue. In all self-driving technology, redundancy is hugely important. If one system fails, there has to be another component that can pick up the slack.
Torc has been tackling this issue from the very beginning by testing its technology in a myriad of environments. From rainy conditions to snowy days, our team has been laser focused on creating a driverless vehicle that can handle all kinds of weather.
The following are some highlights. In all cases, the safety driver’s hands and feet are off the steering wheel and pedals:
- Can self-driving cars drive in bad weather? We were ready to find out if ours was up to the task. On the first day of our coast-to-coast trip from Washington, D.C., to Seattle, Washington, the team experienced a downpour while navigating through heavy traffic. “In the worst of the West Virginia downpour, the car could see better than we could,” said one of Torc’s safety drivers.
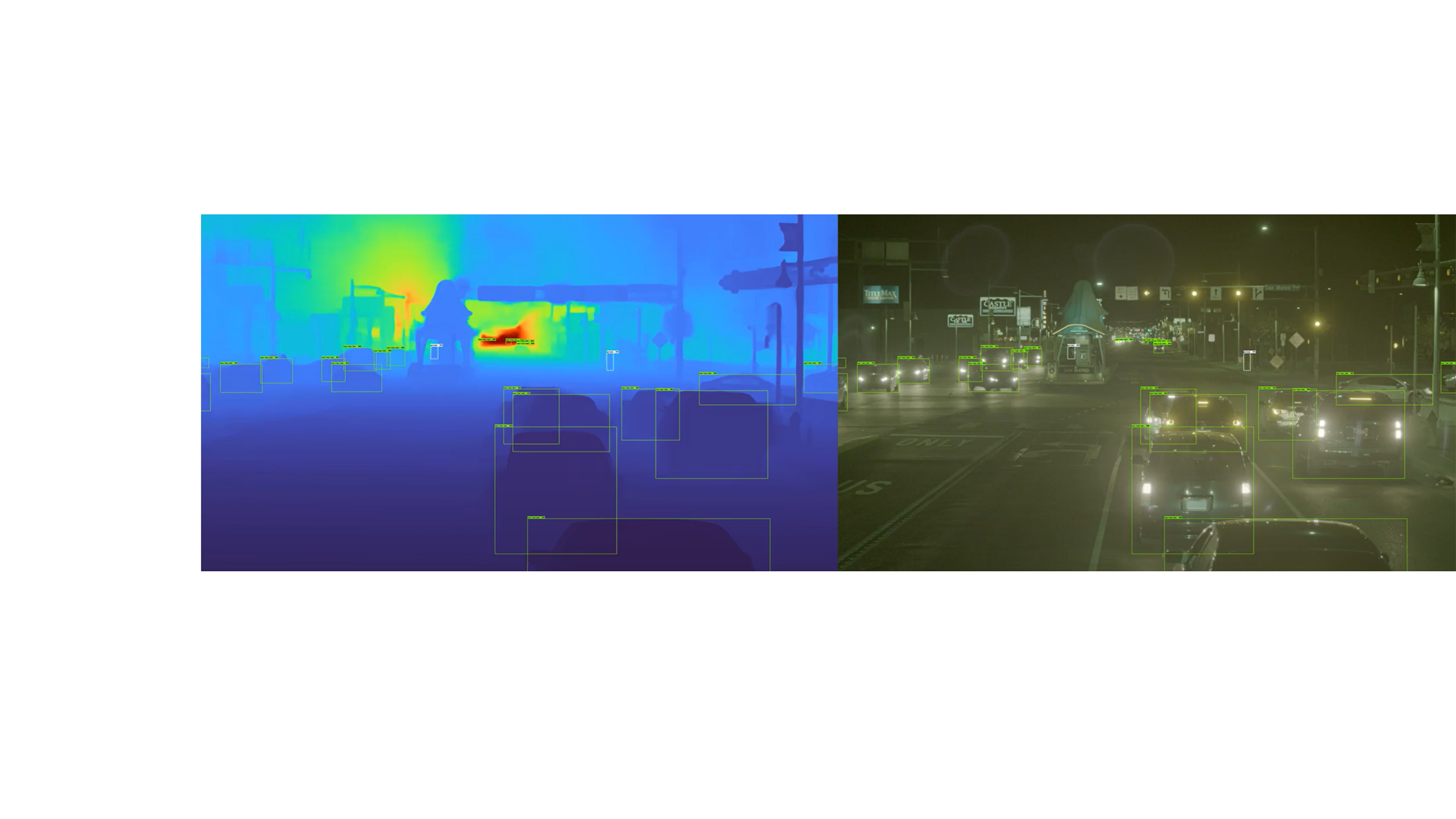
- How do self-driving cars handle bad weather? Our local tests included autonomous lane changes, passing, and merging on and off highways, all through heavy rain. Our self-driving cars use various different sensors to handle bad weather. Torc’s multi-sensor approach used the strength of several sensors (including radar and LiDAR). The sensors have a 360°-view of the cars’ surroundings, and we utilize our proven algorithms along with real-time data to help the car “see” through low visibility.
- Even sunny weather conditions where the roads are wet provide a challenge for autonomous vehicles. The reflective surface distorts the view of lane lines and the road. Many experts cite this visibility as a challenge for automated vehicles of all kind. Despite these visual challenges, Torc’s car performed well. Our team is accustomed to autonomously navigating challenging situations, and we are continually testing and improving the system in inclement weather.