PUBLICATIONS
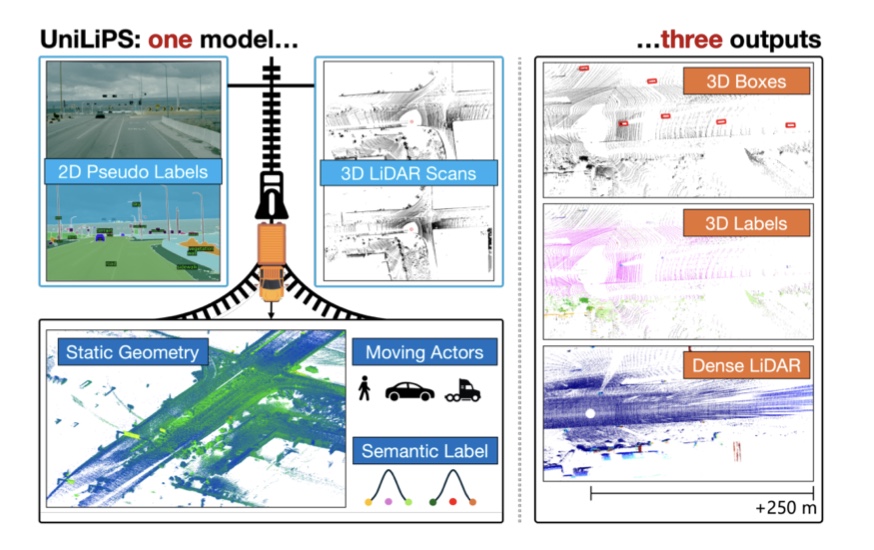
UniLiPs: Unified LiDAR Pseudo-Labeling with Geometry-Grounded Dynamic Scene Decomposition
Unlabeled LiDAR logs, in autonomous driving applications, are inherently a gold mine of dense 3D geometry hiding in plain sight – yet they are almost useless without human labels, highlighting a dominant cost barrier for autonomous-perception research. Our method jointly produces 3D semantic labels and 3D bounding boxes, with human-like quality, and densified LiDAR scans that improve existing models depth prediction MAE by 51.5% in the 80–150 meters range and 22.0% in the 150–250 meters range.
Transient LASSO: Transient Large-Scale Scene Reconstruction
While most neural reconstruction methods operate on RGB images or lidar point clouds, we explore scene reconstruction using transient video data. Transient imaging — measuring the time-of-flight of light at picosecond resolution — has been investigated extensively as a method to recover scene information from light transport. We introduce Transient LASSO, a neural scene reconstruction method operating on raw transient measures of outdoor in-the-wild captures to accurately reconstruct the underlying scene geometry and properties.
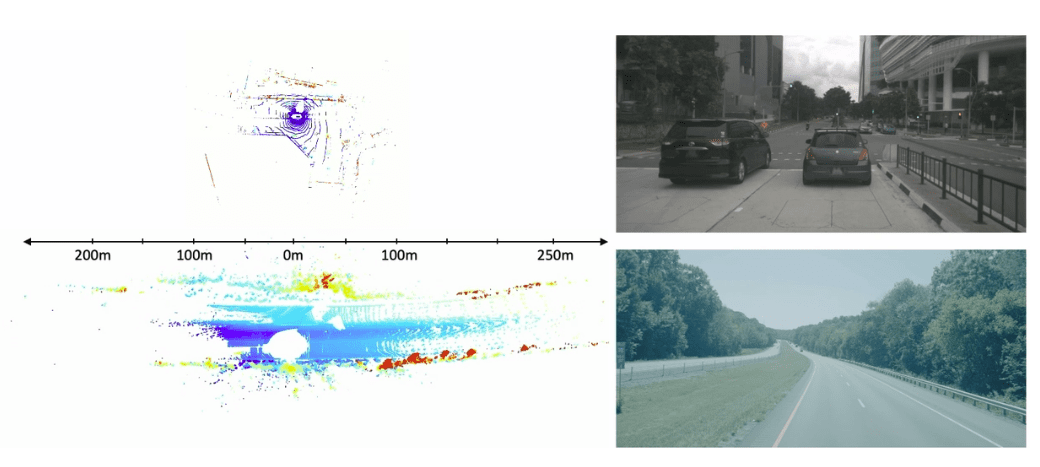
Self-Supervised Sparse Sensor Fusion for Long Range Perception
Safe, long-distance highway travel at speeds exceeding 100 km/h demands perception distances of at least 250 m, which is about five times the 50–100m typically addressed in city driving, to allow sufficient planning and braking margins. Our approach efficiently fuses camera and lidar data, enables to extend perception distances to 250 meters and achieves an 26.6% improvement in mAP in object detection and a decrease of 30.5% in Chamfer Distance in LiDAR forecasting compared to existing methods, reaching distances up to 250 meters.

Introducing The ML FMEA
The integration of Machine Learning (ML) into safety-critical applications continues to raise challenges related to risk management and standardization. This paper presents a structured approach to safe ML development, readily applicable to sectors such as automotive, autonomous vehicles and systems, defense, healthcare, pharmaceuticals, manufacturing, logistics, and aerospace.
RAVE Checklist: Recommendations for Overcoming Challenges in Retrospective Safety Studies of Automated Driving Systems
Along with other recognized safety experts from the autonomous industry (Waymo, Cruise, Torc), academia (UMTRI, VTTI, University of Technology Dresden), and insurance (IIHS, if Insurance), Torc’s Shane McLaughlin was a co-author on an August 2024 paper. Click through to read the paper in full at the Arvix website.
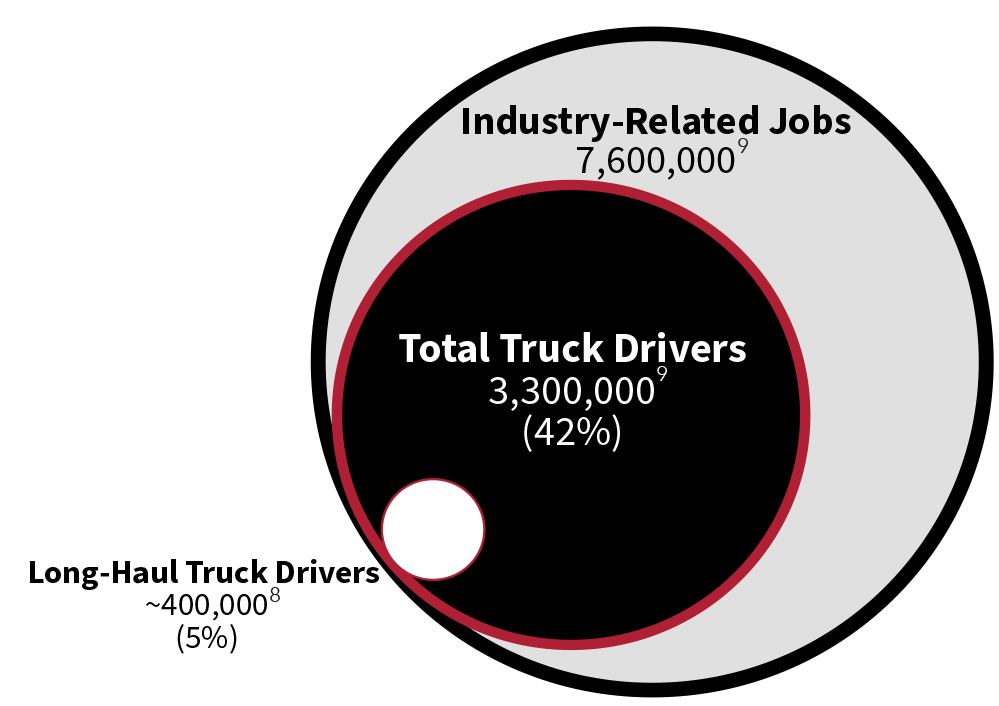
Potential Workforce Impacts of Autonomous Trucks
As autonomous trucks become a reality on our roads, truck drivers are wondering about the potential impacts this technology could have on their jobs. In the future, automation will augment and improve, not replace, the trucking workforce.
Speaker REQUEST
Are you holding an event that could benefit from a discussion about the autonomous future? Please use this form to request a Torc speaker at your event. Please provide as many details as possible in your request. We will use the information to determine if our leadership team or other Torcr's are able to attend.