PUBLICATIONS

Introducing The ML FMEA
The integration of Machine Learning (ML) into safety-critical applications continues to raise challenges related to risk management and standardization. This paper presents a structured approach to safe ML development, readily applicable to sectors such as automotive, autonomous vehicles and systems, defense, healthcare, pharmaceuticals, manufacturing, logistics, and aerospace.
RAVE Checklist: Recommendations for Overcoming Challenges in Retrospective Safety Studies of Automated Driving Systems
Along with other recognized safety experts from the autonomous industry (Waymo, Cruise, Torc), academia (UMTRI, VTTI, University of Technology Dresden), and insurance (IIHS, if Insurance), Torc’s Shane McLaughlin was a co-author on an August 2024 paper. Click through to read the paper in full at the Arvix website.
CtRL-Sim: Reactive and Controllable Driving Agents with Offline Reinforcement Learning
A framework that leverages offline reinforcement learning for controllable closed-loop simulation.
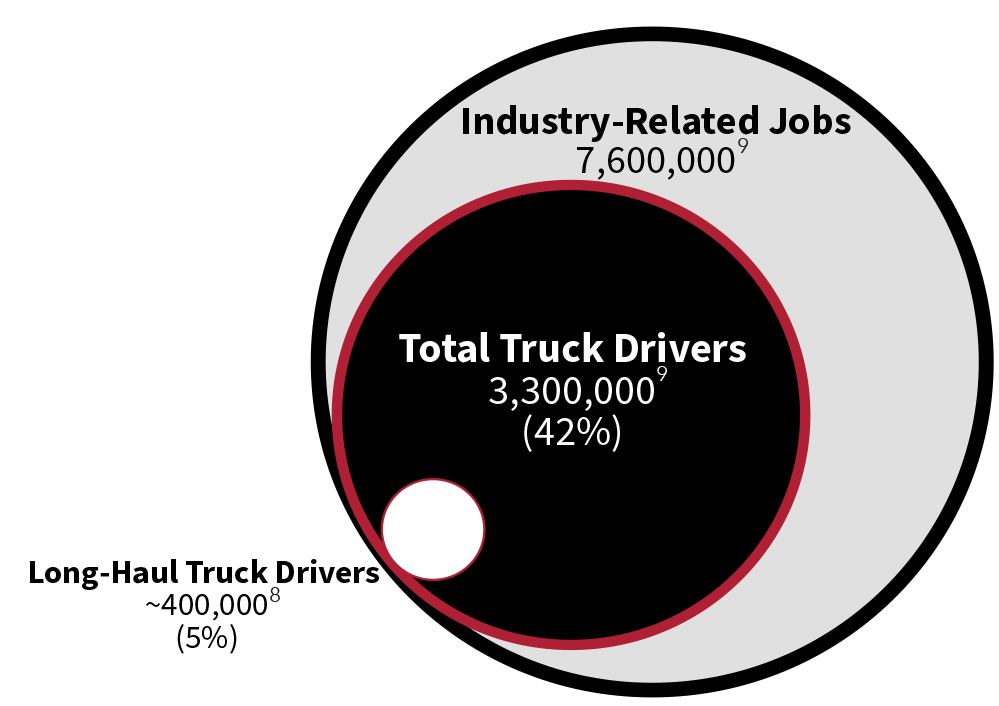
Potential Workforce Impacts of Autonomous Trucks
As autonomous trucks become a reality on our roads, truck drivers are wondering about the potential impacts this technology could have on their jobs. In the future, automation will augment and improve, not replace, the trucking workforce.
Speaker REQUEST
Are you holding an event that could benefit from a discussion about the autonomous future? Please use this form to request a Torc speaker at your event. Please provide as many details as possible in your request. We will use the information to determine if our leadership team or other Torcr's are able to attend.