Chaka’s over 25 years of experience supports Torc’s growth and safety-focused mission of leveraging autonomous trucking technology to help save lives
BLACKSBURG, Va. – Feb 22, 2023 – Torc Robotics, an independent subsidiary of Daimler Truck AG, has named Michelle Chaka as senior vice president, Safety and Regulatory. Michelle brings over 25 years of safety and regulatory expertise to the company, having a unique mix of experience at General Motors, Ford Motor Company, Virginia Tech Transportation Institute, and most recently, Locomation.
In her new role, Chaka will serve as the safety champion for Torc, fostering a culture that values safety, data-driven and evidence-based approaches, and transparency. She will oversee and coordinate safety across the company which includes the Safety Management System (SMS) program, regulatory compliance, and industry best practices. Important aspects of the SMS program are governance, risk management, and assurance. Chaka will serve as the chair of the Torc Safety Board (TSB) and continue to build the SMS program. Additionally, she will co-chair the Legal and Regulatory Safety Committee (LARS). Chaka will report directly to Torc’s CEO, Peter Vaughan Schmidt.
“Torc is dedicated to saving lives through the use of innovative technologies. From my first conversation with the Torc team, it was evident that saving lives was more than an aspirational mission, it is a Torc core value,” commented Chaka. “Serving as a champion for safety is an honor, and I am thrilled to be joining a team whose culture embodies and exemplifies safety in every aspect of the company.”
Chaka’s extensive experience provides a solid safety, regulatory, and engineering foundation, and she is well-versed in automated technology and data analytics. As a proven safety leader, she has delivered innovative products/programs from concept to production and worked with the larger safety community to advance safety for all road users. Furthermore, Chaka led automated driving research projects sponsored by the National Highway Traffic Safety (NHTSA) and which NHTSA published to provide the learnings to all stakeholders.
Chaka holds a master of science in Automotive Engineering Technology from the University of Michigan and a bachelor of science in Mechanical Engineering from Michigan State University.
About Torc Robotics
Torc Robotics, headquartered in Blacksburg, Virginia, is an independent subsidiary of Daimler Truck AG, a global leader and pioneer in trucking. Founded in 2005 at the birth of the self-driving vehicle revolution, Torc has 17 years of experience in pioneering safety-critical, self-driving applications. Torc offers a complete self-driving vehicle software and integration solution and is currently focusing on commercializing autonomous trucks for long-haul applications in the U.S. Torc operates test facilities in Albuquerque, New Mexico, and engineering offices in Austin, Texas, and Stuttgart, Germany. Torc’s mission is saving lives with autonomous technology, which incorporates reducing highway deaths, enabling critical supplies – including medicines and foods – to reach every community in a timely manner, and helping the transportation industry increase fuel economy, uptime, and capacity.
Torc hosted a fireside chat at Manifest 2023 in Las Vegas on Wednesday, February 2. Peter Vaughan Schmidt, CEO of Torc, Joanna Buttler, head of the global autonomous technology group at Daimler Truck, and Brian Stuelpner, vice president of strategy, planning and architecture with Schneider, gathered in the Torc booth to discuss the autonomous freight pilot program collaboration between the three companies, moderated by Torc Robotics director of product strategy, Walter Grigg.
Individually, they each stressed the need for safety in and around the technology, a clear understanding of the use cases of autonomy both on the Torc side and the freight side, and the practical needs for servicing trucks. Watch the full chat below, and check out the transcript to read along.
Transcript of the Torc Fireside Chat with Peter Vaughan Schmidt, Joanna Buttler, and Brian Stuelpner.
Walter Grigg All right. For those of you interested in and hearing the panel here, our fireside chat. I’m Walter Grigg with Torc Robotics. I work in our corporate strategy group. I focus primarily on maintaining and developing our relationships with our partners, focused on collaboration, which is really going to be the majority of the topic that we talk about today.
If it’s not already obvious to all of you, we are an independent majority owned subsidiary of Daimler Truck, focused on Level 4 development in the Class 8 space. With us today, we’ve got Brian Stuelpner from Schneider, one of our key partners. Joanna Buttler from Daimler Truck as well as Peter Vaughan Schmidt, our CEO at Torc Robotics. We started as Torc Robotics, with Daimler Truck in collaboration and partnership on how to develop this technology and bring it to market.
And we wanted to talk about how collaboration and partnership across the industry takes place as we develop these things. So if possible, what I’d like to do is have each of you introduce yourself. Brian from Schneider, Joanna from DTNA, Peter Vaughan Schmidt from Torc Robotics. Introduce yourself, talk about what your role is, and we’ll get into further questions about how partnership drives the development of this technology.
Brian Stuelpner OK. I’ll go first. Good afternoon. My name is Brian Stuelpner. I’m with Schneider, vice president of strategy, planning and architecture. And in that role, I work with our strategy innovation teams, some various technical responsibilities, and then today I’ll be representing our experience as part of this pilot. So thank you for having us.
Joanna Buttler I’m Joanna Buttler. I’m with Daimler Truck North America. I lead our global autonomous technology group. And in my role, and my team is working on unlocking the value of autonomous driving for the industry, for society, and, of course, for our valued customers. And in that, we’re developing the truck platform with our partners like Torc Robotics and also work towards really developing an ecosystem, an infrastructure that enables this technology.
Peter Vaughan Schmidt And my name is Peter Schmidt. I came from Daimler Trucks where I had been 17 years. October 1st, CEO of Torc Robotics. So I just finished my first hundred days and still super excited… this bird can fly… like hell. And it’s a really cool job. And I’m yeah, my job is obviously running the company, but also bringing it to the next level, which means making this technology a true product and a business, not only cool tech. Looking forward to it.
“This bird can fly like hell.“
Peter Vaughan Schmidt
Walter Grigg So thank you all very much. So as we talked about, in the frame of partnership and collaboration, Torc Robotics individually sees the only pathway to success as working with the industry partners, understanding what’s needed to make a product. Joanna, as Daimler is a market share leader, many, many customers in the space. Collaboration and partnership clearly is what built the organization that you have. If you could take the opportunity to talk about how you collaborate with fleets, how you work with them, and how it also relates, one, in the frame of this technology, but also, the other technologies that Daimler’s employing.
Joanna Buttler Yeah, absolutely. Great question to start off with. So we have a purpose principle that says we start with listening and that is really what our collaboration with our customers is all about. We do not understand trucking and also this is what the business of our customers are and we really want to understand how does technology, any technology that we develop, work seamlessly with logistics processes and really has an impact, a positive impact on our customers’ business and bottom line.
And to give you a couple of examples, we established so-called “customer councils” and this is a forum and an opportunity to really sit together, collaborate, collect feedback and collect input and play that back also to our customers. On the mobility side, in all our electric mobility products that you see right now in the market, they could not have come to life without the input of our customers, and really helping us define and design what this product should do and how it can work and then ultimately testing and validating it together. And now when we talk about autonomous, we are also establishing and have established a council. But I’ll let Peter talk a little bit more about the advisory council.
Walter Grigg That’s the Torc Autonomous Advisory Council; we took Daimler’s lead. You showed us the framework of how to do it and Peter, if you have any thoughts on how we utilize the Torc Autonomous Advisory Council?
Peter Vaughan Schmidt First of all, what I really like about it, like you said, we start with listening. We do exactly the same thing at Torc. It’s representing, I think more or less the freight industry, transportation industries. It’s really well known names — super proud Schneider is on there but also others representing various segments because it’s not just different industries, there are many, many subsegments and we get all the input which is needed from them.
And then I think the most interesting thing about this is really I was saying, developing a product and a business, not only a cool tech. And, you know, in the end we want to do something which helps our customer, the fleets, to make their business better. Drive safer, arrive faster, reduce cost, and cost per mileage, do it at super easy to use, fully integrated into their systems.
Easy to use in mixed fleets, which will be a reality for many, many years. Manual plus automated trucks and driven in parallel, but also how to maintain, how to operate things like this and you can only learn this by collaborating with fleets.
Of course at the last thing is just fun. I mean it’s so much more motivating talking to customers, it’s so much more motivating shipping real freight instead of concrete blocks and you learn so much more because it just behaves differently and the inspiration level is much you would never want to disappoint the customer. Freight is variable. Sometimes it’s fully loaded, sometimes it’s partial. There’s so much learning and excitement that comes with it. That’s the reason.
Walter Grigg And in that piloting partnership Schneider has proven already to be an incredible partner in helping us learn and understand. Brian, getting a little bit more deeper into the core technology itself, one of the most important aspects about autonomy that you see for your organization, but also in the spirit of partnership and collaboration that you’re hearing from your customers as you’re advising them.
Brian Stuelpner Sure. So from our customer’s perspective, they’re incredibly excited about the possibilities. They want to be part of the evolving supply chain, and this is a great experience for them to be able to learn alongside us, to understand operationally, how does this work technically? How does this work to learn about the potential cost implications, the sustainability benefits potentially. So from a customer standpoint, they’re excited to be on the journey with us, which has been great.
I think from our perspective through the pilots, we’re trying to learn as much as we can. You know, not just about the technology and the operations and the processes that go along with it, but also about our partners. And I think one of the benefits that we’ve had is learning about Torc, the culture that you have, the safety mindset that you have, which is really important for us. Seeing that alignment between those core values has been has been great for us in the process.
I think one of the benefits that we’ve had is learning about Torc, the culture that you have, the safety mindset that you have, which is really important for us. Seeing that alignment between those core values has been has been great for us in the process.
Brian Stuelpner, speaking about Torc and Schneider’s alignment
Walter Grigg
Understood. I don’t know, Joanna, if you have any further insights on how you see the value of pilots, as we talked about, as Brian speaks about his customers, and his organization. I think we all fundamentally agree safety is always number one. But where do you see the value of pilots across the autonomous technology space, but also the broader DTNA and their customer base?
Joanna ButtlerYeah, absolutely. For us, as we develop the chassis, the redundant platform, it gives us the opportunity to have insights much earlier in the development process. I mean, together with our customers and also Torc and their test team, they’re collecting millions of miles and we get all that feedback and all the data back much earlier in the process than what we would do usually in a development product or project.
And also you know, we need to think about how do we go to market and how does going to market also means how are we going to service these vehicles in the future. Something that we established early on as a service model, you know, how do we provide uptime for these prototype fleets that are running on the roads right now? And this is very critical because uptime is important not just later on in production, but during the development process as well. And collaborating here with Torc with folks like Schneider and also, you know, the service network that we already have established early on in the process helps us just to learn so much sooner what it means to bring this to market and not just have the first time launch, but continuity and a great customer experience in the long run.
As we develop the chassis, the redundant platform, pilots gives us the opportunity to have insights much earlier in the development process. I mean, together with our customers and also Torc and their test team, they’re collecting millions of miles and we get all that feedback and all the data back much earlier in the process than what we would do usually in a development project.
Joanna Buttler, speaking about autonomous freight pilot programs
Walter Grigg Peter, on if you have any further insights on the value of the pilots that we’ve not already discussed or anything that you want to make sure everybody understands that we’re gaining from the pilots.
Peter Vaughan Schmidt Yeah, I think it just helps in the development process because we are running much bigger distances, a variable load, you want to arrive on time and things like that, and you arrive from hubs and you depart in hubs. So we are really confronted with the reality that if you do your testing, it’s always staged and and here it’s really about reality.
But what I like much more is also alluding to what you said, this product will be all about reliability. So it must be safe, it must have attractive cost position, but if the downtime is not as good as today or even better, industry won’t accept the product. We can design in a lot by just making sensors robust, by defining our operational design domain, and the software ourselves, but in the end, parts will break. That’s the nature. I mean, the life of a truck is really a tough one. Over one million miles? Parts will break. Now to understand what would that mean for fleets? How can we predict that something could go wrong, that it’s a planned downtime instead of an unplanned downtime? If something happens, how can we utilize what Schneider has in place? What Daimler has to offer, and I think Daimler has by far the most dense and best service station network out there. Parts, parts availability and things like that.
And that’s the other side of reliability because things go wrong. But they should go wrong planned instead of unplanned, and then be fixed as fast as possible, and as easy as possible for fleets like Schneider. And that’s that really is all about having a product, not only a cool technology. They really are that, and I think that’s what we are learning about.
Last but not least — sorry for not stopping. How does all of this integrate into our ecosystem? And it’s here in system, what APIs are needed? What information do we need to send to Schneider, let’s say from the traditional truck, plus the autonomy on top, most probably presented in a pretty similar fashion? So that is also easy to use, and that sort of big learning that we get out of it.
Walter Grigg So without the real world testing, with the partnerships with the pilots, there is no way to come up with a plausible solution with an integrate-able product. These things have to happen. The pilots must occur.
Joanna, if we have the opportunity to zoom out a little bit. So we’ve talked very closely about autonomy and about the nature of the pilots. Daimler, as a broader organization, serves the transportation industry in a lot of technologies and a lot of spaces. I don’t know if you wanted to spend some time talking about any of the other technologies, the applicability of those technologies as that stands to serve the transportation industry in terms of efficiency, safety, and maybe even dig a little bit into how we serve the industry at large, through the service network, or any of the other offerings that Daimler provides.
Joanna Buttler A big question a lot to unpack here in this question. So maybe I’ll just start with what we see here today. You know, if you take a look around the show floor at the very end, you’ll see actually the platform science track. So one example, how we build connected solutions and a platform that helps our customers in doing business easier and really integrating driver applications on a platform.
And we have been the first ones to offer that to the market with our partner platform science. Then if you step over a little bit, we just yesterday revealed our Supertruck II, really great that we could showcase how to double freight efficiency and that is still with a diesel power train. So there’s a lot of technology development even with a very traditional, let’s say, nontraditional core technologies and then of course developing and further advancing our zero emission vehicle portfolio.
Right now we focus on battery electric vehicles. We have our eCascadia in series production. I accept orders and now also this year we’ll launch our eM2 production ready. So we’re making great strides in those technologies. Then add autonomous on top of it, which we believe is really going to drive towards our what we call our vision zero, zero fatalities, zero on planned downtime, and then at some point in time, also zero emissions.
But we want to do things at the right time, the right way, move at the “speed of right,” so to speak, and bring those technologies together when the time, the maturity is there of all of them, and the use cases, especially, right? We talk about providing solutions for our customers so we don’t develop just an autonomous electric connected vehicle for the sake of doing it and have to fit, you know, the use case and task to solve a real problem.
We’re working to watch that. And for that reason, it’s important to stay connected internally within Torc, of course, but with our partners and with our customers and yeah, really excited what the future holds.
Walter Grigg So I think the opportunity to actually get some feedback from a customer when we talk about collaboration and partnership, speaking on behalf of Schneider, but also representing your counterparts and colleagues in the industry, as you’re working with technology developers and providers, the OEMs, what’s your advice on what we could do to make your organization have better tools, be more equipped? But also the feedback is your opportunity to tell us how to be better.
Brian Stuelpner Yeah, thanks, I think some have already been hit on in this conversation. So two things would jump out to me. One, a safety focus, and the other is the operational focus. So I think we as carriers have a responsibility to the motoring public to move freight safely we need to help our customers deliver on their promises safely. So for us, safety is number one.
So the technology has to work, it has to be reliable. That is why we’re doing these pilots. We want to be there at the forefront, you know, helping the technology be as safe as possible. So safety as a mindset, safety in practice, that’s number one. Number two would be the operational component. So, like you said, it can’t just be cool. It has to be cool and practical and cost effective, and and and… So for us, or for for I guess for you guys making sure that the technology does fit the right use case, that you have anticipated some of the challenges that that happen in trucking, and you have the processes and procedures to address them is important for us as well because we need uptime. We need to be on time with our freight and we need equipment that that works. And I think you guys have done a great job so far with that and we’ve really been happy as part of the process and continue to see it evolving.
Walter Grigg Understood. And Peter, as we think about working with our partners and our customers, our potential customers, as the technology expands in development, as we expand our pilot partnerships, what are you most excited about that we get to do on behalf of our customers and with our customers in the future?
Peter Vaughan Schmidt So that the transformation itself, I think solving major industry problems like driver shortage, safety or the overall capacity that we can offer. I think this is an overarching goal. It’s super interesting here. My mind also starts spinning … what is all possible once the technology really hits the road and is reliable. And you have to think about how you even could restructure logistics networks.
If all of a sudden, hours of service is no limitation anymore, you could arrive much faster, and then my mind starts spinning of what is all possible. It’s not our job; it’s the top of the fleet. And I’m pretty sure you already have 10,000 ideas. What could that all mean in the future? But it’s so exciting being part of this, elevating the industry and again, enabling our customers to do their business better because they know their business better.
It’s not our task to do their business; it’s enabling them. And I think that there’s so much opportunity and I still think we are just scratching the surface. By safety, reliability and cost — there is so much more — how a future could look like all this next day delivery and things like that. I think there are cool things to come.
Walter Grigg It’s a partnership, and collaboration is a requirement to sustain innovation, to make our to make our potential customers and our partners more effective in industry. Joanna, is there anything that you think we may be missed or anything in the frame of partnership and collaboration that you like to make sure we cover?
Joanna Buttler I think you all covered wonderfully, but I would say — not one entity or one person can do it alone. And I honestly, I love the collaborative aspect because we can do so much more if we work as partners and identify what our unique, individual strengths are. Bringing them together in the right way to really unleash a great product, transform our industry, and do good for society.
Walter Grigg Brian, any final thoughts?
Brian Stuelpner No, I would just echo what Joanna said, and I think events like this are also a great place to see that partnership in action. I’m glad we can get together. And I think there are many other, you know, capabilities being demonstrated here that as we look at across the ecosystem, the partnerships that we can have is really going to be a positive force for the future.
It’s not our task to do their business; it’s enabling them. And I think that there’s so much opportunity and I still think we are just scratching the surface. By safety, reliability and cost — there is so much more — how a future could look like all… I think there are cool things to come.
At Torc, we get a lot of questions about our trucks. Whether we’re visiting our local high schools or answering questions via social media, it’s clear that there is a lot of curiosity (and trepidation) about autonomous semi-trucks – and self-driving technology itself. Because we’re passionate about bringing education to the forefront of the conversation about autonomy, we’re taking the plunge into some of our most frequently asked questions.
What are autonomous trucks, or automated semi-trucks?
An autonomous truck is a semi-truck that can deliver goods across the country without needing a driver. Like autonomous cars, these trucks are currently in development at several self-driving-technology companies – and they’re on the horizon with some truly amazing capabilities.
It’s important to remember that all driverless technology exists on a spectrum. Passenger cars and other vehicles with self-driving technology are all around us; you may even drive one yourself! If your car has cruise control, you have a car with self-driving functions – even more so if your car has lane-keep-assist features to help keep you between the lines.
However, at Torc, when we talk about autonomous semi-trucks, we’re talking about full self-driving capabilities. These commercial vehicles use a combination of hardware, software, artificial intelligence, machine learning, and more, to haul freight down highways without needing a driver at some point in the future. Because of their capabilities in speeding up shipping and increasing overall efficiency in the freight industry, many companies including Torc believe that self-driving semi-trucks will be the first commercially viable, autonomous vehicles to scale widely after their initial launch.
With this in mind, there are a few different business models for automated semi-trucks: hub-to-hub and platooning are some of the most popular.
In platooning, sometimes called convoy trucking, one truck follows another, and the lead truck is being driven by an engaged, CDL-licensed human driver. The secondary truck that follows also has a human driver, but that driver is off-duty. (The amount of time that truckers are allowed to drive per 24-hour -period are limited by “hours of service” regulations.) While the second driver sleeps and/or rests, automated trucking software, or a virtual driver, takes over. This virtual driver uses the truck in front of it as a signaler for many of its processes, including braking, accelerating, and even lane-changing.
At face value, platooning may seem like a good path for autonomous trucks, because a human is still involved/in the truck in case something unexpected happens. Secondarily, there are already federal laws set up around team driving; the platooning model just turns one of those team members into a robot.
However, there are some parts of this model that are potentially problematic. In the platooning model, unexpected variables are the enemy. If the follower truck deviates in any way from the lead truck’s behavior or characteristics, things can get dicey. For instance, different set of tires might mean that one truck takes more or less time to brake compared to its leader and vice versa. In the same vein, the trucks may be carrying different loads, meaning that the weight distribution will be vastly different between them, also affecting things like acceleration and braking time.
There’s also the insurance risk. While liability is a hot topic in all forms of self-driving technology, it’s significant in the platooning model. A technological failure in one of the platooning trucks may result in catastrophic damage to both vehicles, creating twice the damage compared to a single, solitary, self-driven vehicle.
And lastly, while there are federal laws surrounding team-based driving, individual state law varies on the platooning concept. Some states, like Arizona, Texas, and Utah, allow automated-follower platooning. However, many other states have “following too close” laws in place that may pose a barrier.
Now, let’s discuss hub-to-hub trucking automation. At Torc, we believe that the hub-to-hub model is the safest, most scalable form of autonomous trucking. We’ve built our business around this concept, as have many of our advisors, partners, and colleagues. From our freight pilot with Schneider to our collaboration with Daimler Truck North America, Torc has built our hub-to-hub model on the proven value of our partnerships.
So, what exactly is the hub-to-hub model? In this approach, human drivers haul semi-trailers on non-highway roads (think city streets and in-town roads, etc. where drivers encounter things like street lights, stop signs, pedestrian traffic, etc.). In the “first mile” of the hub model, human drivers pick up trailers from places like warehouses, depots, big-box stores and other locations to deliver to highway hubs. These highway hubs will act as “home base” for autonomous trucking, and would be built specifically to manage autonomous truck needs. Once that human driver drops off a trailer, an autonomous semi-truck will pick up that same trailer and haul it across “the middle mile:” those long stretches of interstate where over 8,500 trucks travel every day. The freight will be autonomously driven on interstates and highways to the next hub, where that trailer is picked up again by a human driver for in-town deliveries, or “the last mile.”
The hub-to-hub shipping concept isn’t new. Most postal and freight services use some form of hubs; you may have even seen them as stops along the route when you track a package online. Whether that’s a warehouse, an office, or a distribution center, many of our daily packages as consumers go to logistics centers where they can be organized and transported to their next stage of transit. As we bring this new technology into reality, we anticipate that autonomous 18-wheelers will integrate seamlessly within an existing shipping hub’s logistics systems and daily operations.
“The benefit of the hub-to-hub model largely lies in complexity and efficiency of the journey,” says Adam Shoemaker, Torc’s Chief Autonomy Architect. “The US highway system, while still highly variable, provides a reasonably structured environment which enables strategic breakdown and development of efficient and safe vehicle functionality. Similarly, the limited interactions of autonomous trucks with pedestrians, bicycles, and other unstructured use cases within a hub model give the product the flexibility to ensure safety without compromising efficiency and marketability.”
It’s also important to note that self-driving “last mile” delivery trucks can be autonomous, and fall within their own category of autonomous technology. Most autonomous trucking companies are focused on some form of long-haul (middle mile), wherein last-mile delivery is handled by smaller, dedicated robots: think aerial delivery drones and small ground-based robots.
“We believe that autonomous semi-trucks will be the first to make it to market with full autonomy and scalability.”
Adam Shoemaker, Torc’s Chief Autonomy Architect.
What will be the first self-driving vehicle to make it to market?
It can be argued that self-driving vehicles have already made it to market: airplanes operate on autopilot, autonomous cargo ships are on test voyages without a crew, and consumer cars can be purchased with significant degrees of self-driving programmed in. However, none of these vehicles are ready to operate completely on their own just yet.
“We believe that autonomous semi-trucks will be the first vehicles to market with full autonomy and scalability,” Adam noted. “We’re a software company with deep roots in this space as autonomy pioneers, ranging from our 2007 DARPA win, to our previous successful autonomous vehicles for defense and mining, and our ongoing collaboration with Daimler Truck and the Torc Autonomous Advisory Council.”
Torc’s expertise in creating safe and dependable autonomous vehicles is proven. Now, we’re proving our trucking proficiency with initiatives like our freight pilot with Schneider. As we continue to move freight for customers, heighten truck perception, and grow our team, we’re racing towards autonomous trucks: the first scalable, sustainable, and practical self-driving vehicle.
Autonomous trucks might seem like something out of science fiction – especially considering how big and heavy the average 18-wheeler is. In comparison to self-driving cars, creating autonomous semi-trucks sounds impossible. But with years of strategy and careful planning behind them, driverless trucks are both possible and probable.
Most newer cars on the road already have some form of driverless technology built into them. Cruise control, lane-keep-assist programs, and more are all examples of everyday autonomy. Although it may seem like we’re a long way from any form of safe self-driving technology, we already live, work, and drive with this new innovation.
However, when most of us think about self-driving cars, we likely think about the kinds of cars that can completely drive themselves. As we’ve seen on the news and likely read about on our social media feeds, fully self-driving cars have a long way to come before they’re completely capable of operating autonomously.
Many of the issues we see in the news about fully self-driving cars, such as stalling in the middle of a roadway or on-road collisions, are a result of an over-reliance on environmental perception with just cameras. But cameras aren’t able to identify things like depth perception, meaning that they can often make more mistakes than the kinds of sensor suites that are on automated big-rigs like Torc’s. And because those sensor suites require significant financial investment, it’s unlikely that we’ll see them added onto any consumer vehicles hitting our city streets anytime soon.
That said, autonomous semi-trucks offer a new set of possibilities for fleet managers and freight professionals across the country. Increasing fleet utilization, shipping loads faster, and improving driver satisfaction make the investment well worth the while.
When will automated semi-trucks be on the road?
The short answer is that automated semi-trucks are already on the road. In Torc’s case, our trucks drive themselves on highways around Virginia, New Mexico, Texas and Arizona, but it’s important to note that, as of today, there is always an experienced, CDL-licensed human “safety driver” in the driver’s seat, with his or her hands hovering close to the steering wheel, ready to take over in the event that the truck does not behave as expected or unanticipated roadway activity like construction, bad weather or emergency vehicles. While self-driving trucks are on public roads in a testing capacity, they’re not quite ready to roll out without a driver and safety conductor in the cab. In the vast world of driverless technology, there’s still a lot of development to be done.
At Torc, our completely self-driving 18-wheelers (with no human driver in the seat) will be offered commercially when it is safe to do so. Our primary focus now and always is ensuring that these vehicles are as safe as possible for everyone who interacts with them on roads, at hubs, and everywhere these semi-trucks will go.
And although safety is at the forefront of autonomous vehicle technology, there are other aspects to consider when we think about the product timeline. Topics like insurance and government regulations, as well as certain truck capabilities are still being evaluated in the greater autonomous plan. As an industry, we make leaps and bounds towards answering these questions each and every day, but there’s still a lot to figure out.
At our self-driving technology company, we’re working with our partners, fellow industry professionals, and government officials to bring this technology forward together. In order to successfully launch and scale this life-saving software, we have to create a product that works – and excels – across all levels of stakeholders.
Where are driverless trucks being used?
The latest iterations of the Torc self-driving Freightliner Cascadia
Driverless trucks are currently being used in testing and commercial capacities by autonomous technology companies across many parts of the U.S. In many states like New Mexico, Arizona, Virginia, Texas, Oklahoma and California, self-driving eighteen-wheelers are testing and delivering goods on public highways.
While we’re not operaing our automated semi-trucks without human drivers yet, we are working towards a future where our vehicles can operate without a human driver on highways. With safety at the forefront of everything we do, we envision a future where trucks can carry freight to and from shipping hubs just alongside the interstate.
Are self-driving trucks the future?
Self-driving 18-wheelers have the ability to make our lives easier in countless ways. From lowering the cost of shipping to creating better jobs for transportation and freight professionals to helping trucking companies operate their fleets more efficiently, this new technology is going to carry our supply chains to new heights of reliability.
And as we work together to create the first generation of self-driven trucks, we thank our Torc team members for lending their expertise to this article. We’d also like to thank our autonomous community for the following sources used in the creation of this article:
Many of these questions were also provided by PAVE, or Partners for Automated Vehicle Education. Whether it’s self-driving semi-trucks or safety and software, our membership with PAVE allows us to tackle the information challenge in new and innovative ways.
If you’d like to follow our journey to design safe, scalable self-driving 18-wheelers, follow us on social media and check our newsroom regularly for updates.
Autonomous vehicles have the potential to revolutionize transportation as we know it. This tech is also creating new and exciting jobs in the fields of engineering. In part one of this blog series, we outlined how to get started finding a career in the space. Part two discussed some of the most important coding languages to learn in order to find your niche in AV engineering. This final blog in the series is about a success metric that is harder to define: personal development.
Self-driving vehicles are literally driven by software. What could be more important than code?
The human factor of creating autonomous vehicles cannot be downplayed. Behind the robotics, there is a team of people who have a passion for technology and making the world a better place. Creating autonomous systems means working in a fast-paced environment, collaborating with peers on complex challenges, and creating solutions to problems that no one has attempted to solve before. This kind of work is exciting, and it requires more than just coding know-how.
At Torc, we don’t just hire good programmers. We hire people with a consistent drive to accomplish great things. We look for those who don’t let ego get in the way of teamwork, and understand how to communicate with a diverse group.
We call these core values Hungry, Humble, and People Smart.
We asked Torc engineers to go beyond the code and describe the skills they found that were just as important as coding prowess and how their expectations of working in the AV industry differed from reality.
Phil Repisky, Systems Integration Engineer
Coding is probably only a fraction of actual work that goes into development. Before anything is typed, many hours have already been spent finding an appropriate architecture for a set of problems that need to be solved. Any one component will be expected to interact with the whole system to drive a vehicle under challenging conditions. The only factor that makes this possible is the consistent communication among teams, from synthesis through all stages of development.
A common stereotype in this field is one of the “anti-social genius” that knows their field inside and out. In the autonomous vehicle industry, there are plenty of questions that still need to be explored, and no one person knows all the answers. Becoming very comfortable with the uncomfortable feeling of not knowing an answer is the best asset I’ve used. In a classroom there is a huge penalty for getting an answer wrong, which prompts students to never take a risk. In this industry, asking will never put you behind. My experience is that a knowledgeable person will always enjoy talking about the topic they love, so ask away!
My advice to someone trying to enter this field is to be ready to make mistakes, lots of them! If you’ve never made a mistake, you’ve never really tried to do something new. What may look like a huge complicated problem is always a series of smaller systems that can be assessed and fixed on their own. The person who can isolate and solve a networking, hardware, electrical, or programming issue is already an asset to developing technology like ours.
Scott Schlacter, Embedded and Controls
The ability to communicate both technical and non-technical information effectively is one of the most important skills that has helped me succeed at Torc.
My expectation of “real-world” work in general was that I would be a cog in a machine and be shoehorned into doing the same thing over and over. Torc has let me work on all sorts of different problems and get hands-on experience that I never thought I’d be able to get.
Cody McClintock, UAV Software Team Lead
Forward thinking and communication are two important skills needed to work in this space. Whether it’s imagining what needs to happen next or bouncing ideas off of your team, you’ll need to have a multifaceted approach. Being able to have an idea, present a plan to accomplish it, and communicate it in a way that turns complex goals into straightforward topics is extremely powerful in the workplace.
I expected be a part of an ever-changing industry where last month’s “cutting edge” is already being revised and improved. This turned out to be true. The result here at Torc is a beautiful culture where everyone is constantly learning and helping each other. It provides endless opportunity for the most driven to become the expert in tomorrow’s technology and have real impact on the direction of the company.
Sherman Jones, Hardware Team Lead
Communication skills are the non-technical qualities that has helped me the most in this field. Other important qualities are humbleness and drive. You could be the best programmer in the world, but you will not go far without being humble and having the drive to push yourself. If you think you are the best, you will become complacent and will soon fall behind others who continue to push forward.
In the end, you could be one of the smartest people in your field, but you must also be passionate about what you are working on. If working on a self-driving vehicle is your passion, you will find a way to make it happen.
—
If autonomous vehicles are your passion, Torc is the perfect place to take your experience to the next level. Click on our careers page to learn more and see our job openings.
In part one of this blog series, we covered how to get started on your journey to becoming an autonomous vehicle engineer. Now, you may want to know what coding languages and software to learn in order to solidify your spot on a team creating the future of transportation.
See – Think – Act
Imagine driving down a city street and spotting a pedestrian slowly approaching a curb a few hundred feet ahead. While they are not yet in the crosswalk, you put your foot on the brake, predicting that they may begin to cross. As your paths intersect, the person steps forward to cross the road. Already prepared, you come to a stop and allow them to pass.
Our end-to-end Level 4 autonomous system is created to mimic the decision-making process in a similar way to a human driver: See – Think – Act.
This means we implement everything from the sensors that “see” the pedestrian to the algorithms that pull that sensor data together and identify it as a person. The decision and action of whether to stop, slow down, or continue driving is based on behaviors programmed into the system itself.
These simple scenarios become more complex when you consider the environment (rain, snow), other traffic (is someone going to turn?) and route decision-making. We require teams with multiple types of skill sets to make a robust system capable of handling the variety of situations one could encounter on the road.
Our Teams
Active Sensing and Information Fusion – The active sensing team utilizes sensor data and creates algorithms to detect and identify objects for Torc’s autonomous driving systems, allowing the system to understand and react to the environment around the vehicle in real-time.
Machine Learning – Our machine learning team trains our system to identify certain objects it sees in more detail than could be provided with raw sensor data. For example, we use machine learning to teach our system how to identify traffic lights or determine the difference between a pedestrian and a light post.
Mapping and Localization – Autonomous vehicle maps must be much more specific than the typical maps a human would use for navigation. Our mapping team develops the 3D environment and routes our autonomous car drives and works with the localization team to ensure the system knows where it is and how to get to its destination.
Behaviors and Planning – The behaviors team focuses on how the vehicle should act in any given situation. For example, merging on a busy highway requires the vehicle to determine a good spot to “zipper” into the flow of traffic and adjust acceleration to accomplish that safely.
Mechanical – The mechanical team creates the vehicle design concept and integrates sensors, mounts, and computes into the vehicle.
System Integration – Ensuring components work well not only by themselves but as a system is an important role on the team. The system integration team looks at the high-level interactions of the components as a whole.
Embedded, Controls, and Electrical – This team integrates software into the entire system of components and works on the electrical system that controls the vehicle – think acceleration, braking, and steering.
Dev Ops – The Dev Ops team works to manage software deployment and maintain the technical infrastructure.
Safety and Testing – Safety is the main goal of our autonomous system, and thus safety and testing engineers are critical to every stage of our development. Safety and testing teams work to ensure that we can test and verify new capabilities, as well as standardizing safety protocol and practices for all teams.
How should you prepare? We asked Torc engineers what software skills and experience helped them become successful in their specialty on our AV team.
C++ is a performance-oriented language which lets you “pop the hood” and reach deep down into memory management.
If a candidate has solid C++ and Robotic Operating System (ROS) skills, then they’re already a robotics engineer. In order to be a mapping and localization engineer, they need to go a step further and understand general coordinate transformations & 3D geometry. If a candidate has worked with Simultaneous Localization and Mapping (SLAM) then they’re an excellent fit for this role.
Matthew Via, DevOps Engineer
The DevOps team requires skills in unification of software development and systems administration. We use these skills at Torc for managing deployments of software to vehicle compute. Properly administering and managing Linux computers is also an important skill to automate and make our systems robust.
We use fairly complex networks on our vehicles. Being able to architect good network designs and debug complex designs is vital to our work.
The typical technologies that a DevOps team member would use to make a process automatic/repeatable would be Config Management, and Continuous Integration pipelines. Rather than having a developer write software, manually compile it, and then manually copy it to a computer (and then manually configure it), we use automation to ensure that the software is built, installed, and configured with as little possibility for human error as possible.
David Anderson, Principal Mechanical Engineer
In the hardware design field, the most useful software to know is various Computer Aided Design (CAD) and simulation packages. These are used daily to create the hardware that makes this technology work. The most useful coding languages would be Python and MATLAB. The hardware focus is less about Realtime code efficiency, and more about data manipulation and visualization.
Andrew Cunningham, Active Sensing and Information Fusion Software Engineer
C++ is a compiled programming language that supports both object-oriented programming and low-level memory manipulation. Torc uses C++ to power autonomy because well written C++ code is extremely fast and extendable.
A candidate should also be familiar with coding standards. Industrial coding standards forbid certain coding practices that can result in potentially unsafe bugs at run-time. By enforcing these constraints, code is made more safe, portable and reliable. MISRA coding standards are open and while the documentation is dense, key ideas can be learned fairly easily.
Ashwin Sahasrabudhe, Behaviors Software Engineer
Self-Driving Behaviors play an important role in high-level decision making of how the vehicle should behave on the roads considering there are multiple other entities like cars, pedestrians, and bicycles. To deal with these different entities and to develop required safety algorithms, one needs to have a good understanding of how the kinematics and dynamics of a vehicle affect its maneuverability on the road. The fun part about working at Torc is that your work is never restricted to just one component. You get to work on other components like vehicle interface, which controls the actuators of the car. Because of this varied work, it is good to have an understanding of control algorithms, as well as experience in developing and tuning control loops.
With all that said, a question that is commonly asked is ‘Where can I learn about this technology?’ There are a considerable number of simulators available out there which you can play around with. It’s always fun to explore something new and you get a different kind of satisfaction when the car drives in the simulator the way you want it to drive. Hands-on experience and developing a few control algorithms or self-driving behaviors with such simulators is a good start. Also, connect with your peers who are interested in self-driving cars. from personal experience, I would say that working in group projects and learning from others helps a lot when it comes to understanding new technology.
—
Looking for jobs in the self-driving vehicle field? Torc is one of the most experienced autonomous software companies and we are growing our team to revolutionize transportation. See our careers page for more information and stay tuned for part three!
Torc Robotics has formed a multi-year collaboration with Foretellix, a leading provider of verification and validation (V&V) solutions for Automated Driving Systems (ADS). The collaboration provides Torc with a virtual verification & validation platform to scale its software simulation and testing. Foretellix’s solution will help enable Torc’s ongoing initiative to test the millions of driving scenarios required to ensure the safe commercialization of Level 4 autonomous trucks.
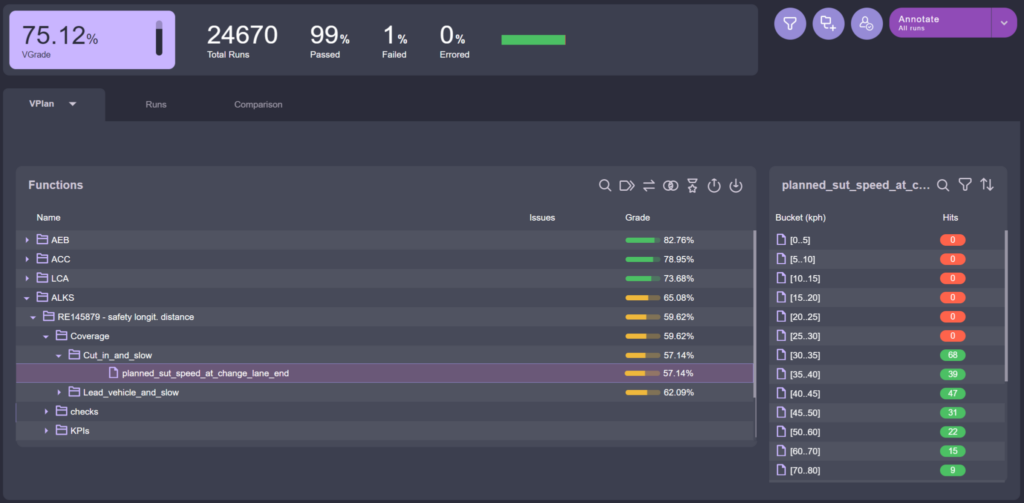
Foretellix’s Foretify™ Safety Driven V&V platform enables development teams to easily collaborate with safety and V&V teams to specify scenarios, generate massive scale testing, and analyze the results. The platform uses the ASAM OpenSCENARIO® 2.0 standard to describe the infinite possible driving scenarios and define safety-driven verification and validation goals. Torc’s development teams are using Foretellix’s L4 highway trucking V-Suites – a V&V package of scenarios, test plans, map data and Key Performance Indicators (KPI’s), for its testing program.
Foretify Manager – Coverage analysis of test results
Foretify uses these scenarios to generate, orchestrate, and execute a multitude of test scenarios in virtual simulation, optimized to represent real-world conditions and uncover unknown edge cases. Foretify continuously measures and analyzes test results and validation completeness and helps development teams uncover bugs earlier in the development cycle. Foretify has been utilized to dramatically reduce development costs, boost development team’s productivity, and improve efficiency in the V&V process while upholding safety requirements.
“Our technology is designed with safety as the first priority,” said Axel Gern, Torc SVP of Engineering, and Managing Director of Torc EU. “Our collaboration with Foretellix is in line with Torc’s safety mission. It provides Torc with V&V tools to add to our current toolset, based on industry standards, to conduct the massive scale testing and validation we need to ensure the safety of our systems”.
“We are very proud to collaborate with Torc Robotics,” said Ziv Binyamini, Foretellix CEO and co-founder. “In the past two years, our teams have been working together, sharing knowledge and expertise to create the best-in-class solution to support Torc Robotics’ goals. We look forward to continuing our joint mission to deploy safe Level 4 autonomous trucking at scale.”
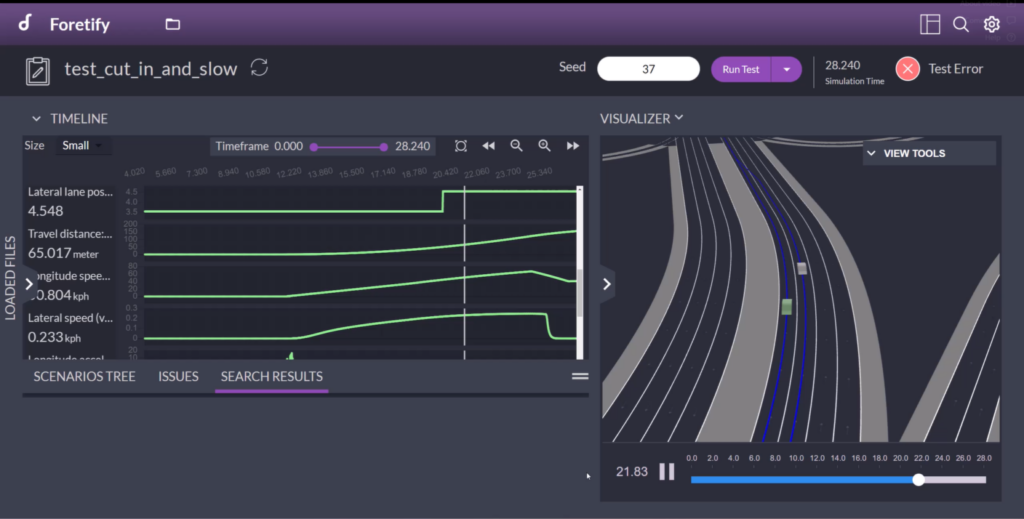
Debugging of test results on the Foretify dashboard
As our laser focus on bringing self-driving semi-trucks to market continues to expand, we’re building toward a scalable product and putting our test fleet to work on highways across the United States. We are excited to announce the expansion of our autonomous testing in the great, sunny state of Arizona.
After mapping these desert highways and working closely with the Arizona DOT, our autonomous test fleet embarked on initial routes through this cactus-laden landscape last month.
This marks a milestone in our goal to expand in the southwest freight corridor and adds to our current testing states: Virginia, New Mexico, and Texas.
When it comes to its testing environment, Arizona contains multitudes: mountains, valleys, and a variety of traffic conditions provide additional testing grounds for honing our capabilities. Additionally, hubs of freight activity such the roads connecting to Phoenix are key points for an autonomous truck company looking to expand their horizons. Torc’s future autonomous trucking pursuits focus on long-haul applications, increasing capacity for transport across long stretches of highway.
Aside from its physical advantages for our testing technology, we also look to Arizona because of its wholehearted support of this new technology. Arizona’s cooperation with autonomous driving companies aligns with our approach to work with state governments on the future of transportation.
The Southwest Freight Corridor and Autonomous Vehicles
In over-the-road trucking, Arizona is a key part of the southwest freight corridor. By expanding in Arizona, we can strategically connect key states and routes to maximize the length of our eventual long-haul network.
The initial use case for our self-driving semi-trucks is built for hub-to-hub freight transport. Human drivers will haul loads from first-mile locations to “hubs” or transfer stations. From there, Torc’s autonomous truck will take over the middle-mile journey by transporting the load from the hub, across federal highways, to another hub station near the final destination. Last-mile deliveries to more complex urban roads or off-highway warehouses will still be transported with a human driver at the wheel.
Arizona is a key state for building hub-to-hub routes because of the sheer volume of freight that moves through this state. In 2012 alone, more than 30,000 trucks transported 10,000,000 tons of freight through the southwestern corridor, which often includes Arizona. With the addition of autonomous trucks, we have the opportunity to increase shipping capacity through this sector, adding efficiency and safe practices for consumers, drivers, and highway users alike.
Self-Driving Trucks in Arizona: Highway Grade
The Copper State has a lot to offer a self-driving truck company like Torc, beginning with the landscape. From the flat roads through Phoenix through to the Grand Canyon in the north, Arizona’s highs are high and its lows are especially low. As I-40 weaves through the desert landscape, so does the highway grade.
On certain stretches of 1-40, the highway grade can climb as much as 7%, meaning that the road will rise or fall a certain amount per 100 feet, given a certain stretch of miles. For semi-trucks, including our self-driving 18-wheelers, the ability to handle grade is incredibly important. Grade affects vehicle speed and vehicle control. As a semi-truck descends, it requires adjustment of controls such as the brake and engine brake. Autonomous vehicles must safely adjust for different grades – and account for their weight and size when it comes to the physics of slowing down or stopping.
This is part of the reason why we’re testing in Arizona. We’re no stranger to mapping an area with severe highway grades; we regularly test our autonomous semi-trucks in the mountains around our headquarters in Blacksburg, VA and elevated highways in New Mexico. However, testing in new and varied areas is an integral part of making sure that our self-driving semi-trucks can launch safely and scale easily.
Arizona provides a unique landscape for said purposes. We’re testing in Arizona to enhance our capabilities in true over-the-road environments and evaluating how our autonomous trucks can work logistically with major fleets for middle-mile deliveries.
“From the red rocks of Sedona to the deep valleys of the Grand Canyon, it’s no secret that Arizona’s landscape provides unique opportunities to increase our test cases, both in the climate and weather department.”
Autonomous Semi-Trucks in Arizona: Weather and Climate
From the red rocks of Sedona to the deep valleys of the Grand Canyon, it’s no secret that Arizona’s landscape provides unique opportunities to increase our test cases, both in the climate and weather department.
Arizona’s climate might be pretty unforgiving for humans, but for Torc engineers, this climate is an exciting opportunity to further their software development. Along with our platform, a Freightliner chassis that is proven in these environments, Arizona’s extreme temperature changes and lack of humidity provide a new set of challenges for our self-driving 18-wheelers and thus, a new dataset for our software development teams to learn from.
As for weather, Arizona’s sandstorms provide an example of weather ‘edge cases.’ While the state typically experiences sunny days and clear skies, on occasion dust storms can whirl through the desert landscape. We’re evaluating how these dusty days can impact the lidar, radar, and cameras mounted on our self-driving vehicles – and developing for everything from perception updates to maintenance needs given these weather events.
Our Self-Driving Semi Future
With Torc trucks officially running on Arizona highways, we’re excited to build on this milestone toward our goal of a safe, profitable autonomous truck solution. Our trucks will continue their routes along highways in Virginia, New Mexico, and Texas. As we work with state regulators and key freight industry leaders, our next steps will be to not only develop our technology but also integrate into the existing freight network.
To learn more about self-driving truck companies in Arizona, we recommend checking out ADOT’s resources on all things autonomous vehicles testing. If you’d like to follow our journey to commercialize self-driving semi-trucks, follow Torc on our social media handles featured below.