Torc’s First Responder Program Recent Highlights



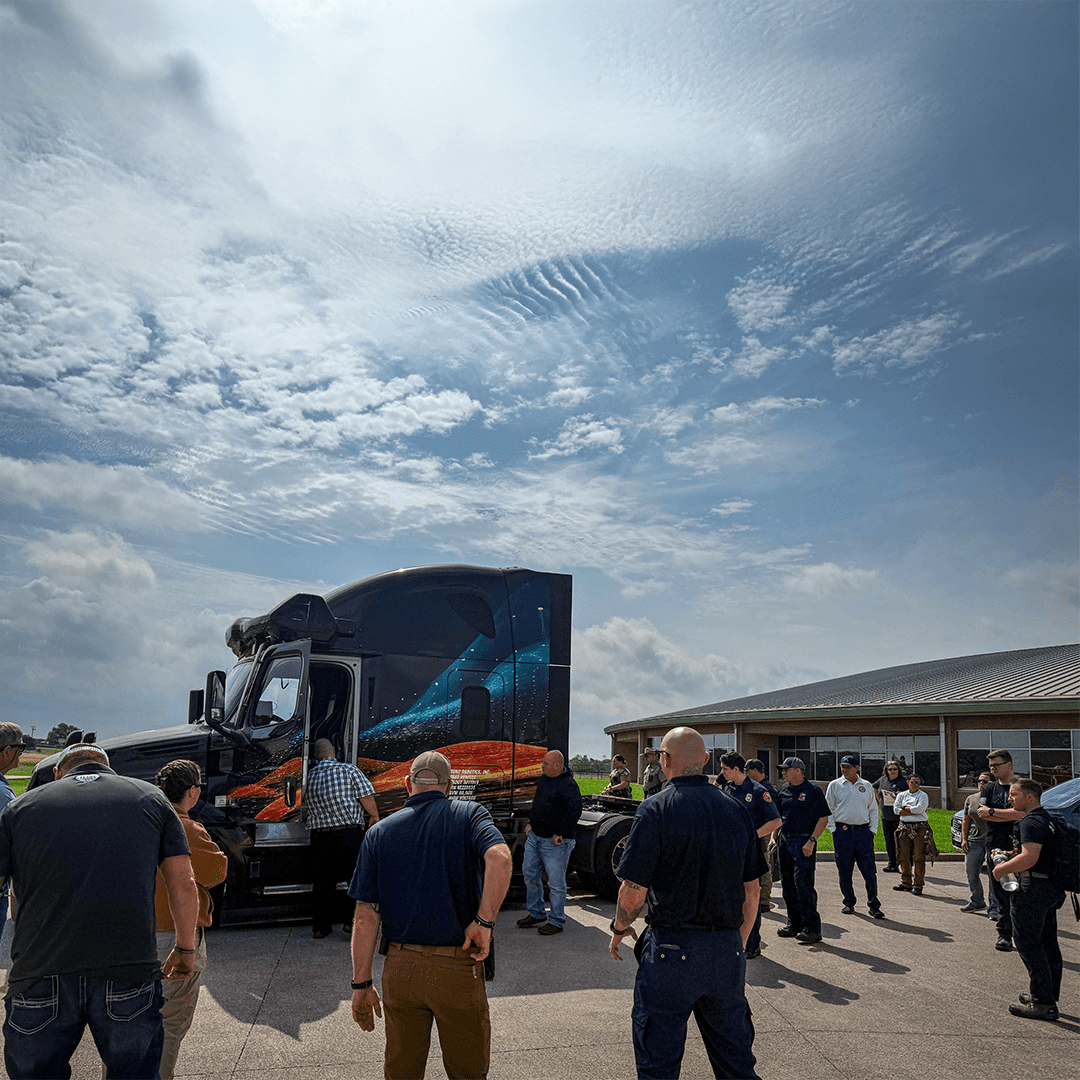

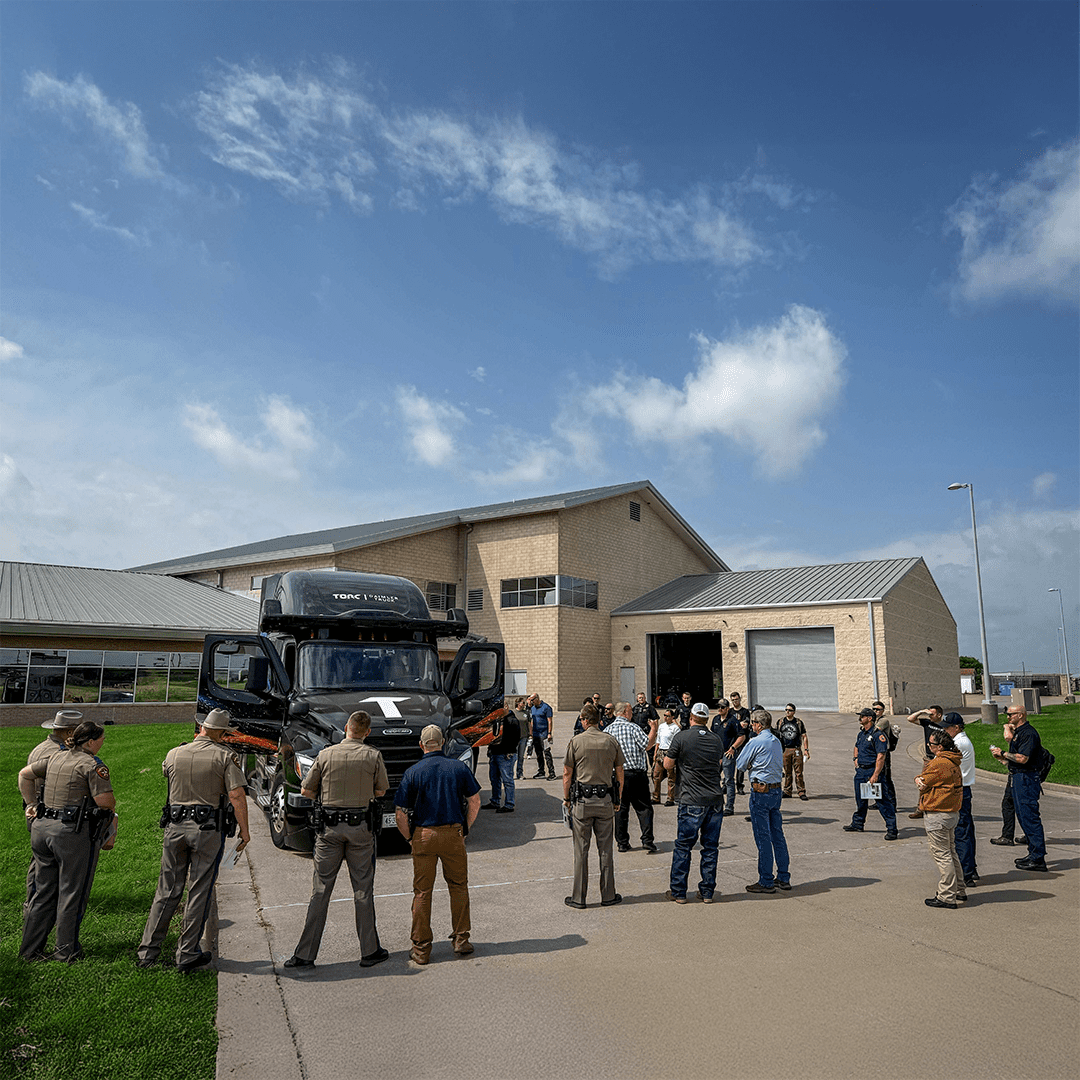
Torc’s First Responder Team recently conducted comprehensive training sessions for more than 150 first responders representing 33 distinct agencies along the Texas I-35 corridor. This initiative is a critical part of Torc’s commitment to preparing the first responder community for interacting with Torc’s self-driving trucks on public roads.
Richard Russell, Senior Manager of First Responder Policy, and Foster Murphy, Fleet Compliance Specialist — with a combined 40+ years of law enforcement experience across city, county, and state levels – delivered training on Torc’s trucks to first responders from various Texas agencies, including Fort Worth PD, Waco PD, Williamson County Sheriff’s Office, and Johnson County Sheriff’s Office.
The sessions provided a deep dive into the essentials of autonomy and offered a hands-on experience with the Torc autonomous truck. Over two hours, Richard and Foster guided first responders through the operational mechanics of autonomous commercial motor vehicles, emergency response protocols, and safety procedures to ensure first responders are well-equipped to handle various scenarios involving Torc trucks.
Looking Ahead
Torc plans to expand its First Responder Training to additional agencies, focusing on where Torc trucks will be operating along I-35 in Texas. Torc is dedicated to fostering trust and collaboration with first responders, recognizing their critical role in ensuring public safety as autonomous technology becomes more prevalent. By continuing to partner with state and local agencies, Torc is committed to advancing the safe adoption of self-driving commercial vehicles, paving the way for a future where innovative technology and public safety go hand in hand.
Check out our First Responder page for more information.